Engineers at the Massachusetts Institute of Technology (MIT) have made a significant advancement in biohybrid robotics by creating a flexible “skeleton” that is powered by muscle tissue.
The breakthrough could potentially revolutionize the fields of biohybrid robotics and medicine, ushering in a new era of technologies that combine the power of biological and artificial components. This advancement has the potential to reshape the landscape of these industries, offering exciting new possibilities for the future.
At the heart of this recent advancement is the development of a unique spring-like device, or ‘flexure,’ which is a term used to describe a structure that can bend without breaking. In this context, the flexure is designed to optimize the natural contractile force of muscle tissues. The novel design potentially paves the way for biohybrid robotics that is more powerful and precise than ever before.
“These flexures are like a skeleton that people can now use to turn muscle actuation into multiple degrees of freedom of motion in a very predictable way,” Dr. Ritu Raman, a Professor of Engineering Design at MIT and study co-author, said in a press release. “We are giving roboticists a new set of rules to make powerful and precise muscle-powered robots that do interesting Things.”
In the quest to harness muscle tissue’s natural power to advance biohybrid robotics development, engineers have long faced the challenge of translating biological motion into mechanical action.
Traditional designs have often relied on attaching a band of muscle tissue between two small, flexible posts. As the muscle contracts, it’s supposed to bend these posts, pulling them together to create movement. Ideally, this action would power a robotic skeleton, transforming the biological force into a useful mechanical output.
However, the reality has been less than ideal. The main obstacle has been the variability in how muscle tissues interact with these posts. For instance, the exact placement of the muscles on the posts, along with the amount of surface area making contact, dramatically influences the effectiveness of the contraction. This variability has made it difficult to create consistent and reliable movement in traditional designs.
Muscles might successfully pull the posts together in some cases, but in others, they might cause the posts to wobble uncontrollably, leading to inconsistent and unreliable movement.
Addressing these challenges, the MIT team reimagined the design of mechanical actuators powered by muscle tissue. The goal was to create a system that could more efficiently capitalize on a muscle’s natural contractions, regardless of muscle placement and contact variability.
This process ultimately led to developing a new modular spring-like actuator or “flexure.”
In a paper recently published in Advanced Intelligent Systems, the MIT team showcased how flexures could maximize muscle contraction and offer a new level of control and precision in biohybrid robotics.
The flexures work by attaching to a band of muscle tissue and effectively converting its contractions into mechanical movement. This approach amplifies the muscle’s natural motion and allows for precise measurement of its performance to various stimuli. The flexures offer a new level of control and precision by providing a more efficient and reliable way to translate muscle contractions into mechanical movement, regardless of muscle placement and contact variability.
By combining rigid and flexible elements within these linear elastic flexures, the researchers say they have outstripped the capabilities of traditional methods for measuring muscle contraction, enabling accurate and real-time performance monitoring even at high stimulation frequencies.
The design of the flexures also ensures they are accommodating in one direction while being stiff in others, focusing the muscle’s energy and maximizing its output. The process enhances a muscle’s natural movement, much like optimizing the weight on a leg press for peak performance.
During experiments, researchers found that when muscle tissue was attached to the flexure, it significantly enhanced its ability to stretch a spring, marking a fivefold increase over previous muscle actuator designs.
“The flexure is a skeleton that we designed to be very soft and flexible in one direction and very stiff in all other directions,” Dr. Raman said. “When the muscle contracts, all the force is converted into movement in that direction. It’s a huge magnification.”
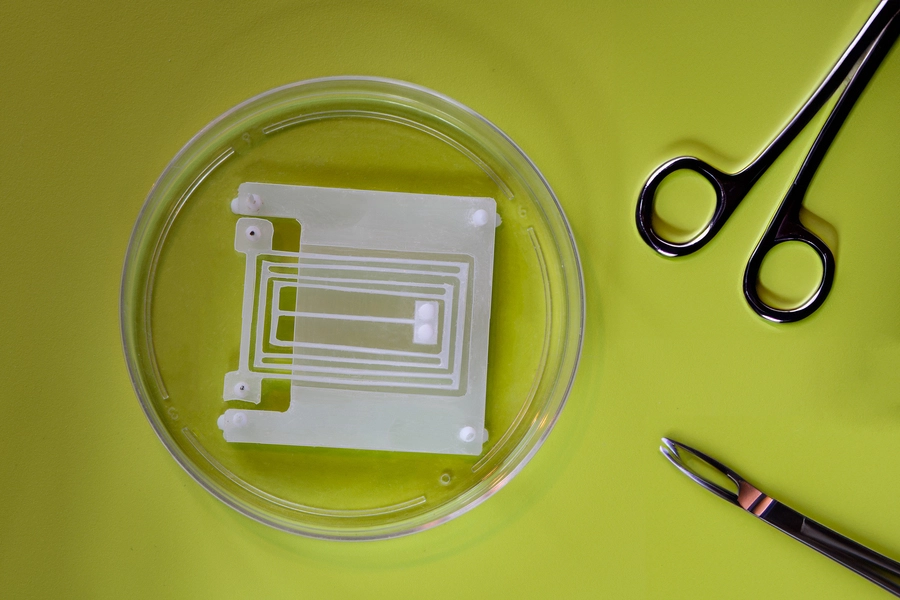
(Image Source: Felice Frankel/ MIT)
Additionally, the development of a device that precisely measures muscle performance and endurance has the potential to improve our understanding of muscle behavior and its implications on physical fitness.

During experiments, researchers found that by altering the frequency of muscle contractions, they could observe the mechanisms that govern muscle endurance and strength. This insight could lead to targeted exercise regimens to enhance muscle resilience and performance, significantly impacting athletic training and physical rehabilitation.
As Dr. Raman notes, “Looking at how quickly our muscles get tired, and how we can exercise them to have high-endurance responses — this is what we can uncover with this platform.”
This breakthrough is significant because it has the potential to fundamentally change how robots are conceived and constructed. The development of these flexures is not just improving the efficiency of muscle-powered robots, but it is also opening up new possibilities for their design and functionality.
Traditional robotics has relied heavily on electric motors and synthetic actuators, components that, while effective, lack the adaptability and resilience of biological muscle. By harnessing the inherent strengths of muscle tissue, MIT’s new flexures offer a glimpse into a future where robots are not just tools but entities that can grow, adapt, and repair themselves.
The advancement of flexures also addresses the critical challenge of developing robust, reproducible, and predictable robotic designs and manufacturing techniques. Ultimately, by offering a standardized way to measure and optimize muscle actuators’ performance, this technology could lead to the scalable production of biohybrid robotic machines.
The innovation sets the stage for developing advanced biohybrid robotics beyond simple demonstrations to creating more complex and reliable machines. Researchers say they are now adapting and combining flexures to build “precise, articulated, and reliable robots powered by natural muscles.”
“An example of a robot we are trying to build in the future is a surgical robot that can perform minimally invasive procedures inside the body,” Dr. Raman explained. “Technically, muscles can power robots of any size, but we are particularly excited in making small robots, as this is where biological actuators excel in terms of strength, efficiency, and adaptability.”
Tim McMillan is a retired law enforcement executive, investigative reporter and co-founder of The Debrief. His writing typically focuses on defense, national security, the Intelligence Community and topics related to psychology. You can follow Tim on Twitter: @LtTimMcMillan. Tim can be reached by email: tim@thedebrief.org or through encrypted email: LtTimMcMillan@protonmail.com