
In a robotics and disaster relief breakthrough, researchers from Nanyang Technological University (NTU) in Singapore, Hiroshima University, and Osaka University in Japan have unveiled a revolutionary swarm navigation algorithm for cyborg insects.
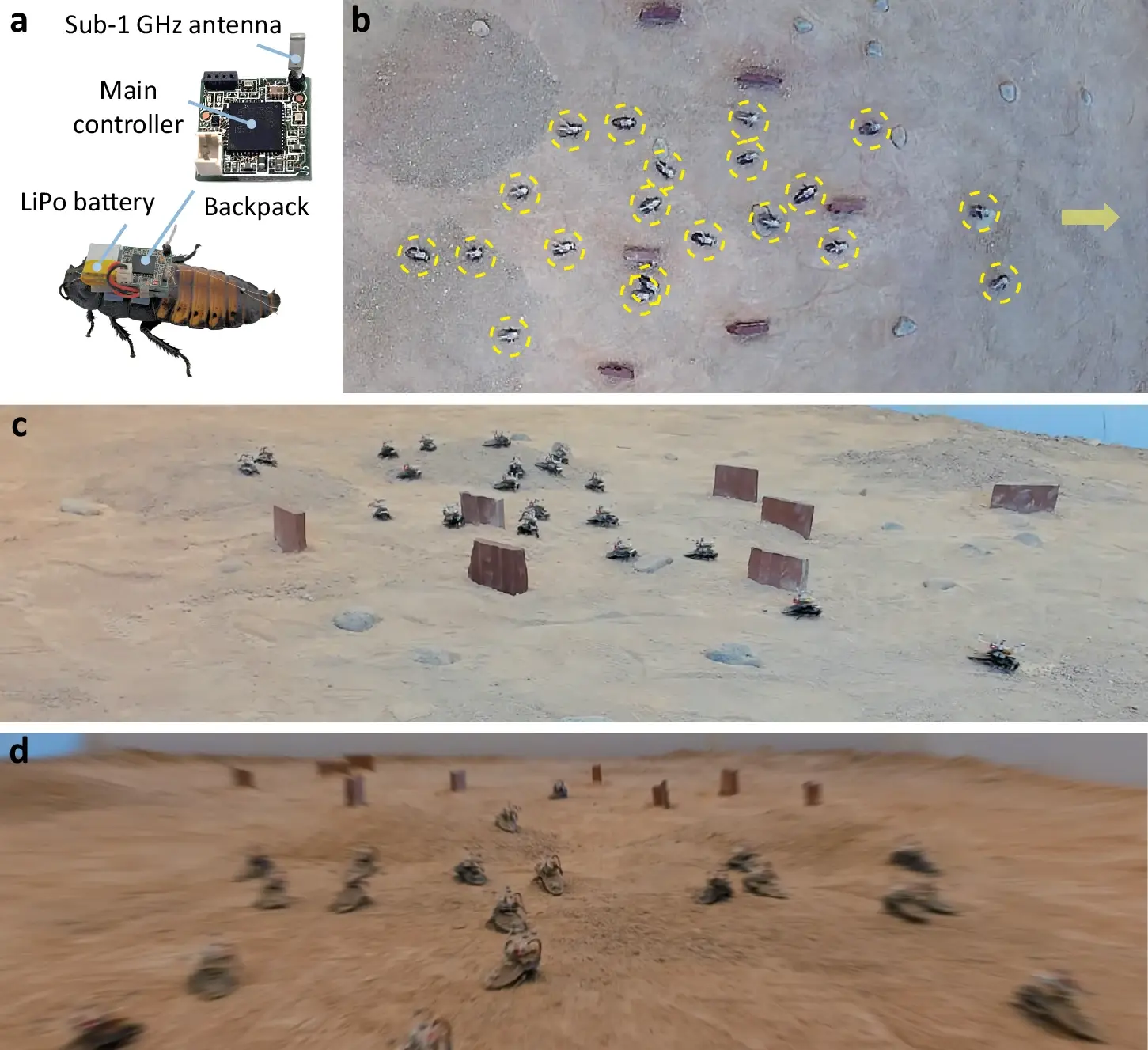
These “cyborg insects” are living creatures with tiny electronic backpacks designed to navigate challenging terrains and narrow spaces. This advancement in biohybrid technology could lead to applications in search-and-rescue missions, infrastructure inspections, and environmental monitoring.
“To conduct search and inspection operations, large areas must be surveyed efficiently, often across challenging and obstacle-laden terrain,” study co-author and professor of mechanical and aerospace engineering at NTU, Dr. Hirotaka Sato, explained in a release. “The concept involves deploying multiple swarms of cyborg insects to navigate and inspect these obstructed regions.”
“Once the sensors on the backpack of a cyborg insect detect a target, such as humans in search-and-rescue missions or structural defects in infrastructure, they can wirelessly alert the control system.”
Cyborg insects, a hybrid of biological organisms and robotics, have been explored for years. In 2022, Dr. Hirotaka Sato and his team showcased the feasibility of transforming insects into controllable biohybrids by outfitting them with ultrasoft organic solar cells. More recently, scientists from the University of Queensland demonstrated a similar breakthrough, equipping beetles with tiny backpack-like circuit boards to create functional robotic hybrids.
Despite these advances, coordinating the movements of a group of these biohybrid creatures has remained problematic. This challenge arises from the inherent variability in insect behavior, which makes synchronized control of a swarm particularly complex.
In a study published in Nature Communications, researchers detail how they have overcome this challenge by developing a swarm navigation algorithm that employs a leader-follower dynamic. This breakthrough enables the insects to work cohesively, ensuring efficient navigation while adapting to real-world terrains and obstacles.
The innovative approach leverages the insects’ natural instincts while reducing the need for constant external control. The leader insect, equipped with a destination programmed into its backpack, acts as the guiding force for the swarm.
The other insects, known as followers, use the leader’s cues and their own localized information to maintain group cohesion. The result is a swarm capable of collaborative problem-solving, such as freeing stuck insects or recovering overturned members.
Dr. Wakamiya Naoki, a professor of Engineering at Osaka University and co-author of the study, emphasized that this breakthrough redefines how we envision collaboration between living organisms and machines.
“Unlike robots, insects do not behave as we intend them to,” Dr. Naoki explained. “However, instead of forcibly trying to control them precisely, we found that taking a more relaxed and rough approach not only worked better but also led to the natural emergence of complex behaviors, such as cooperative actions, which are challenging to design as algorithms.”
“This was a remarkable discovery. While their actions may appear haphazard at first glance, there seems to be a great deal we can still learn from the sophisticated and intricate behaviors of living organisms.”
The core of the innovation lies in what the researchers call the Tour Group Inspired (TGI) control algorithm. The concept borrows from the dynamics of tourist groups following a leader: a cohesive system where individuals maintain autonomy yet operate within the group’s framework.
The TGI algorithm relies on two key behavioral rules: a free motion rule that permits insects to move independently when surrounded by others and a move-toward-crowd rule that ensures isolated insects rejoin the swarm by moving toward the leader or nearby peers. This unique approach dramatically reduces insects’ need for direct electrical stimulation.
Constant stimulation can cause the insects to become less responsive over time and drain the batteries powering their electronic backpacks. However, by cutting stimulation by almost 50%, the new algorithm doubles the insects’ autonomous navigation time, making the system energy-efficient and practical for extended missions.
In addition to energy savings, the algorithm ensures that the swarm remains cohesive and adaptable. When one insect becomes stuck or flips over, nearby members instinctively assist it. This behavior arises not from programmed commands but as a natural outcome of the algorithm’s design.
The insects’ instinctual movements and the algorithm’s guidance create a cooperative system uniquely suited for unpredictable and complex environments.
The applications of this innovation are vast, but its potential for disaster response is particularly compelling. Traditional robotic systems, such as drones or wheeled robots, often struggle to navigate confined spaces or terrains littered with debris. In contrast, cyborg insects excel in these environments, thanks to their small size and natural ability to maneuver through tight spaces.
During laboratory tests, the swarm of Madagascar hissing cockroaches successfully traversed a challenging, sandy terrain filled with rocks and hills.
Equipped with tiny electronic backpacks containing sensors and communication systems, the insects demonstrated their ability to locate targets efficiently. The researchers envision deploying such swarms in disaster zones, sending them into rubble piles to find survivors within the critical 72-hour window.
Another key challenge in controlling swarms of cyborg insects is avoiding entanglement, a common problem when multiple insects come into close proximity.
Traditional methods often rely on intensive stimulation to separate insects, which can lead to unintended collisions and damage to the equipment. The TGI algorithm, however, minimizes this risk by allowing insects to navigate freely when surrounded by others.
This approach reduces entanglement incidents by over 85% compared to conventional methods while enhancing the swarm’s overall safety and durability.
In experiments, neighboring insects were observed aiding stuck or overturned members. For instance, when one insect became wedged on an obstacle, nearby members circled around it, effectively helping it escape. Similarly, overturned insects utilized physical interactions with their neighbors to right themselves, further demonstrating the robustness of the swarm.

Another standout feature of the cyborg insect system is its unparalleled energy efficiency of the insects themselves. Unlike traditional robots, which rely on motors that consume significant power, cyborg insects use their natural legs for locomotion. The lightweight electronic backpacks provide occasional nudges via electrical stimulation, guiding the insects while conserving energy.
This efficiency makes cyborg insects a cost-effective alternative to conventional robotics, particularly for missions requiring prolonged operation. In environments where access to recharging stations is limited, such as disaster zones or remote areas, their ability to operate for extended periods is invaluable.
While the current experiments relied on centralized motion-capture systems to coordinate the swarm, the research team plans to transition to decentralized control systems in the future.
These systems would use low-power sensors and communication modules to enable the insects to operate independently. By integrating Inertial Measurement Units (IMUs) and Ultra-Wideband (UWB) technology, the researchers aim to allow the swarm to function without relying on external tracking systems.
Beyond disaster response, this technology’s potential applications span infrastructure inspection, environmental monitoring, and precision agriculture. For instance, cyborg insects could inspect hard-to-reach structural components for defects or assess soil conditions in dense farmlands.
Researchers highlighted the breakthrough’s broader implications, noting that the collaboration demonstrates the power of interdisciplinary research in tackling real-world challenges.
Ultimately, the development of swarm-controlled cyborg insects represents a bold step forward in robotics. It blends biological and mechanical systems to solve some of humanity’s most pressing challenges. From disaster relief to environmental monitoring, the potential applications are vast and transformative.
By harnessing the natural instincts of living organisms with cutting-edge technology, researchers believe cyborg insect swarms are poised to become indispensable tools for navigating the unknown with efficiency, resilience, and adaptability.
“Our swarm control algorithm represents a significant breakthrough in coordinating groups of cyborg insects for complex search-and-rescue missions,” study co-author and Professor of Advanced Science and Engineering at Hiroshima University, Dr. Masaki Ogura, said. “This innovation has the potential to greatly enhance disaster response efficiency while also opening new avenues for research in swarm control.”
“It underscores the importance of developing control methods that perform effectively in real-world scenarios, going beyond theoretical models and simulations.”
Tim McMillan is a retired law enforcement executive, investigative reporter and co-founder of The Debrief. His writing typically focuses on defense, national security, the Intelligence Community and topics related to psychology. You can follow Tim on Twitter: @LtTimMcMillan. Tim can be reached by email: tim@thedebrief.org or through encrypted email: LtTimMcMillan@protonmail.com