Thanks to the COVID-19 pandemic, more and more people are turning to telehealth or remote systems to diagnose their health issues. In the wake of this shift, researchers at the University of Science and Technology of China have created a soft robotic “finger” with an enhanced sense of touch, that can perform routine doctor visits and find abnormal lumps and other ailments. Their findings were published Cell Reports Physical Science.
This robotic finger opens other avenues of research, including offering more advanced disease diagnosis, such as earlier stages of breast cancer, catching these issues earlier to allow for better chances at successful treatment. This type of robot may also make the experience of visiting a doctor’s office less uncomfortable or invasive during physical exams.
“By further development to improve its efficiency, we also believe that a dexterous hand made of such fingers can act as a ‘Robodoctor’ in a future hospital, like a physician,” said Hongbo Wang, a researcher specializing in sensing technologies at the University of Science and Technology of China and one of the study’s authors. “Combined with machine learning, automatic robotic examination and diagnosis can be achieved, particularly beneficial for these undeveloped areas where there is a serious shortage in health workers.”
The Demand for Gentle Touch
The need for a delicate touch in medicine has long been a concern in the medical field. Although rigid robotic fingers already exist, experts have expressed worries about their ability to perform the nuanced tasks required in a clinical setting without hurting or making the patients uncomfortable. Some experts are concerned that a stiff robotic finger could even rupture the lumps they find in the exam.
To overcome this challenge, other researchers have developed lightweight, soft robotics that mimic human hand movements. However, these previous devices could not sense the complex properties of objects in the same way human fingers do.
“Despite the remarkable progress in the last decade, most soft fingers presented in the literature still have substantial gaps compared to human hands,” the authors wrote in their paper, pointing out that robotic fingers had not yet been prepared for “real world” scenarios.
Creating a Soft but Sensing Hand
The research team designed a straightforward device, split into two parts, featuring conductive fiber coils. One coil is wound on each air chamber of the device’s bending actuators (the components responsible for movement), while a twisted liquid metal fiber is mounted at the fingertip.
By measuring changes in the device’s electrical current, the team could monitor, in real time, the degree of finger bending and the force applied at the fingertip, allowing the device to sense an object’s properties effectively.
To test the device’s sensitivity, researchers first brushed a feather against its fingertip.
“The magnified view clearly shows the resistance change, indicating its high sensitivity in force sensing,” the authors explained.
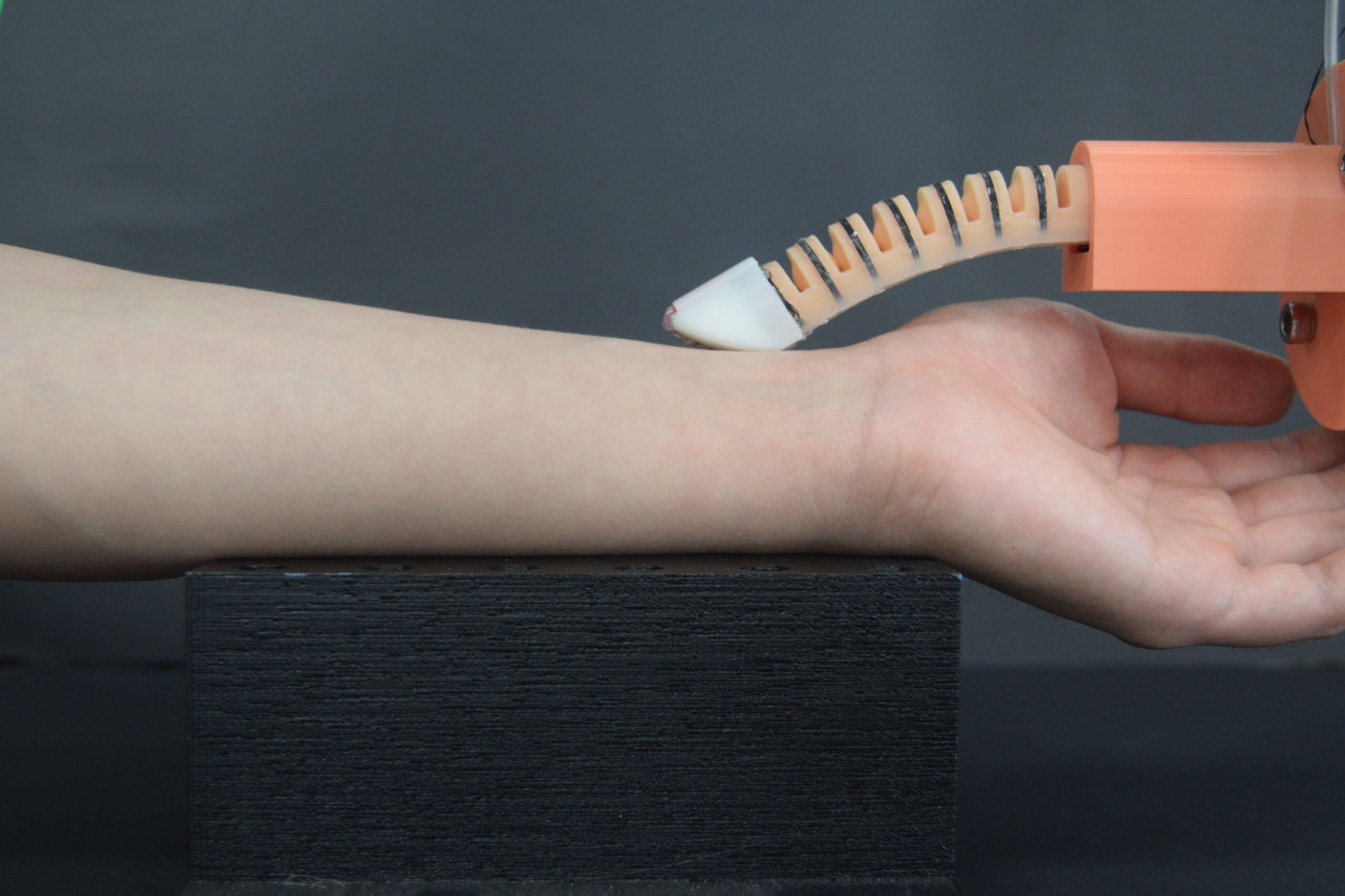
Further tests involved tapping and pressing the fingertip with a glass rod while repeatedly bending the finger. The sensors within the device successfully and accurately measured the type and quantity of force applied. To evaluate the finger’s medical capabilities, the researchers mounted it on a robotic arm. They watched as it identified three lumps embedded in a large silicone sheet, pressing on them like a physician. Additionally, the finger located an artery on a participant’s wrist and took their pulse.

“Humans can easily recognize the stiffness of diverse objects by simply pressing it with their finger,” the authors noted. “Similarly, since the [device] has the ability to sense both its bending deformation and the force at the fingertip, it can detect stiffness similar to our human hand by simply pressing an object.”
The device even demonstrated its versatility by typing the word “hello” on a keyboard, showcasing its ability to mimic human hand movements.
Looking ahead, the researchers aim to add more sensors and increase flexibility in the finger’s joints, enabling movement in multiple directions akin to a human finger.
“We hope to develop an intelligent, dexterous hand, together with a sensorized artificial muscle-driven robotic arm, to mimic the unparalleled functions and fine manipulations of the human hands,” Wang added.
Kenna Hughes-Castleberry is the Science Communicator at JILA (a world-leading physics research institute) and a science writer at The Debrief. Follow and connect with her on X or contact her via email at kenna@thedebrief.org