A Chinese research team has developed a new autonomous transmedium drone capable of flying in the air and swimming underwater.
Dubbed the “TJ-FlyingFish,” or “Mirs-X,” the new robotic vehicle was developed by a consortium of scientists from China’s Shanghai Research Institute for Intelligent Autonomous Systems, Tongji University, and the Unmanned Systems Research Group at the Chinese University of Hong Kong.
The new drone has been described as a hybrid unmanned aerial and submersible vehicle that seamlessly transitions between aerial flight and underwater exploration.
The ability to traverse land and sea opens the door to various potential applications for the transmedium drone, including search and rescue operations, aerial/water surveying, and remote sensing.
Engineering a hybrid transmedium vehicle that can fly in the air and swim underwater presents a unique set of challenges.
The significant changes of added mass, fluid drag force, and “ground effect” when crossing the air-water surface mean that an unmanned aerial/underwater drone must possess a reasonably powerful propulsion system.
A transmedium drone must also be able to precisely control its propulsion speed in differing environments. A drone that moves too quickly in the air will experience drag, while a drone that moves too slowly in the water will experience drag. The drone’s center of mass must also be carefully balanced to ensure buoyancy in submersible operations and stability during aerial flight.
Developing sensing and communication systems that can work effectively in air and water is also problematic, as the different environments present unique challenges to these systems. For example, underwater communication is more difficult due to the attenuation of electromagnetic waves in water.
Finally, all of these challenges must be overcome while still designing a device that is small and lightweight enough to fly effectively while also being durable enough to withstand the forces of underwater operation.
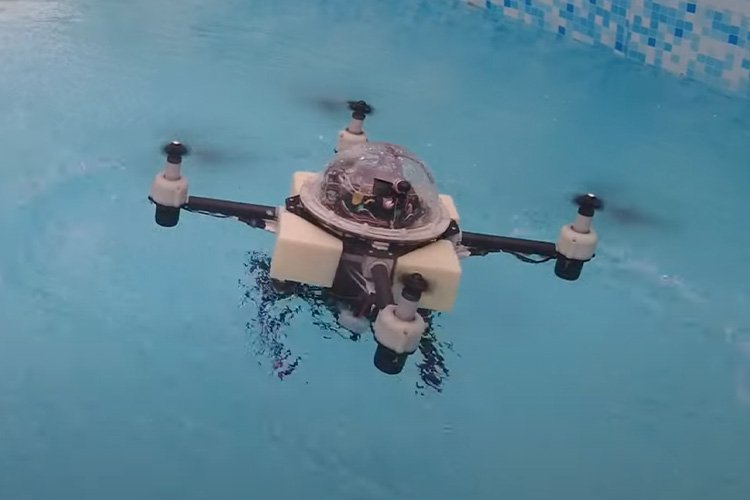
Outwardly, the TJ-FlyingFish looks like a standard quadcopter UAV, with four rotary wing arms extending from a central body.
To overcome some of the challenges associated with unmanned aerial/underwater drones, each of the TJ-FlyingFish’s four rotary wing arms are outfitted with two-speed gearboxes. The rotary arms also independently rotate, allowing the drone to manipulate the direction of the thrust being generated by the propellers.
When in flight, the TJ-FlyingFish’s four propeller units face upward and rotate at higher speed, the same as a conventional quadcopter UAV.
When the drone lands on the water’s surface, the four propellers switch to a lower speed and rotate 180 degrees to face downward. This transition creates a sufficient force to allow the device to submerge.
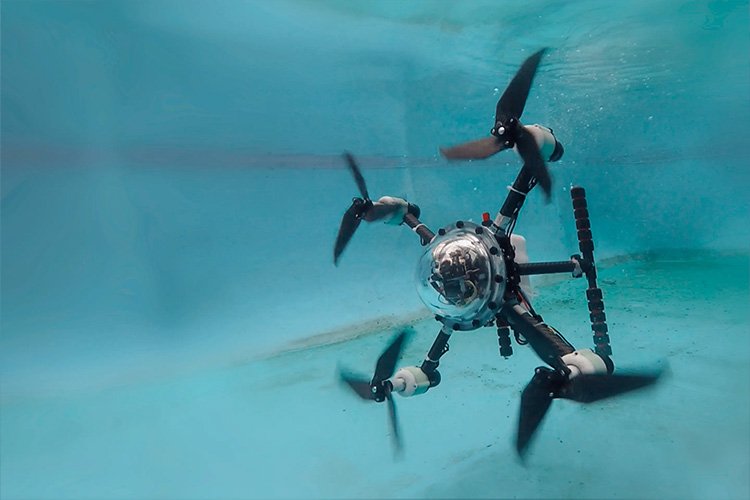
Once submerged, the transmedium drone can independently rotate its propulsion units to adjust its angle and thrust, allowing it to “swim” underwater.
The TJ-FlyingFish can reportedly reverse this process to allow the drone to resurface from the water and resume flight.
According to one of the engineers who participated in developing the TJ-FlyingFish, Dr. Ben Chen, from the Chinese University of Hong Kong, the drone can operate entirely autonomously without a “human in the loop.”

In its current proof-of-concept form, the transmedium drone weighs 3.6 lbs and possesses enough power for six minutes of flight, or 40 minutes of underwater exploration, between battery charges. The TJ-FlyingFish is reportedly capable of descending to a maximum depth of nearly 10 feet and has a submerged top speed of 6.6 feet per second or 4.5 miles per hour.

Some have expressed concern over China’s potential development of a transmedium drone, given the recent high-profile incidents involving airborne espionage over the United States, including the recent shoot-downs of a Chinese spy balloon and three “unidentified” airborne objects.
Calling the TJ-FlyingFish “creepy,” a recent article by Fox News said, “Although its capabilities look pretty cool, in the wrong hands, this device could be dispatched on some dastardly missions.”
Interestingly, the idea of technologically advanced vehicles capable of operating both underwater and in the air has come up during the U.S. Department of Defense’s recent investigations of “unidentified aerial phenomena” (UAP).
In The Debrief’s previous reporting on a 2020 classified intelligence report issued by the DoD’s UAP Task Force, an intelligence official familiar with the ongoing examinations said investigators had not ruled there being a “subsurface” or “transmedium” component to some UAP incidents.
Currently, the TJ-FlyingFish only exists as a functional prototype. Developers hope the design can be advanced and used for aerial/aquatic surveys, remote sensing, and search-and-rescue operations.
Researchers are expected to present peer-reviewed findings of their work at the 2023 IEEE International Conference on Robotics and Automation in London this May.
Tim McMillan is a retired law enforcement executive, investigative reporter and co-founder of The Debrief. His writing typically focuses on defense, national security, the Intelligence Community and topics related to psychology. You can follow Tim on Twitter: @LtTimMcMillan. Tim can be reached by email: tim@thedebrief.org or through encrypted email: LtTimMcMillan@protonmail.com