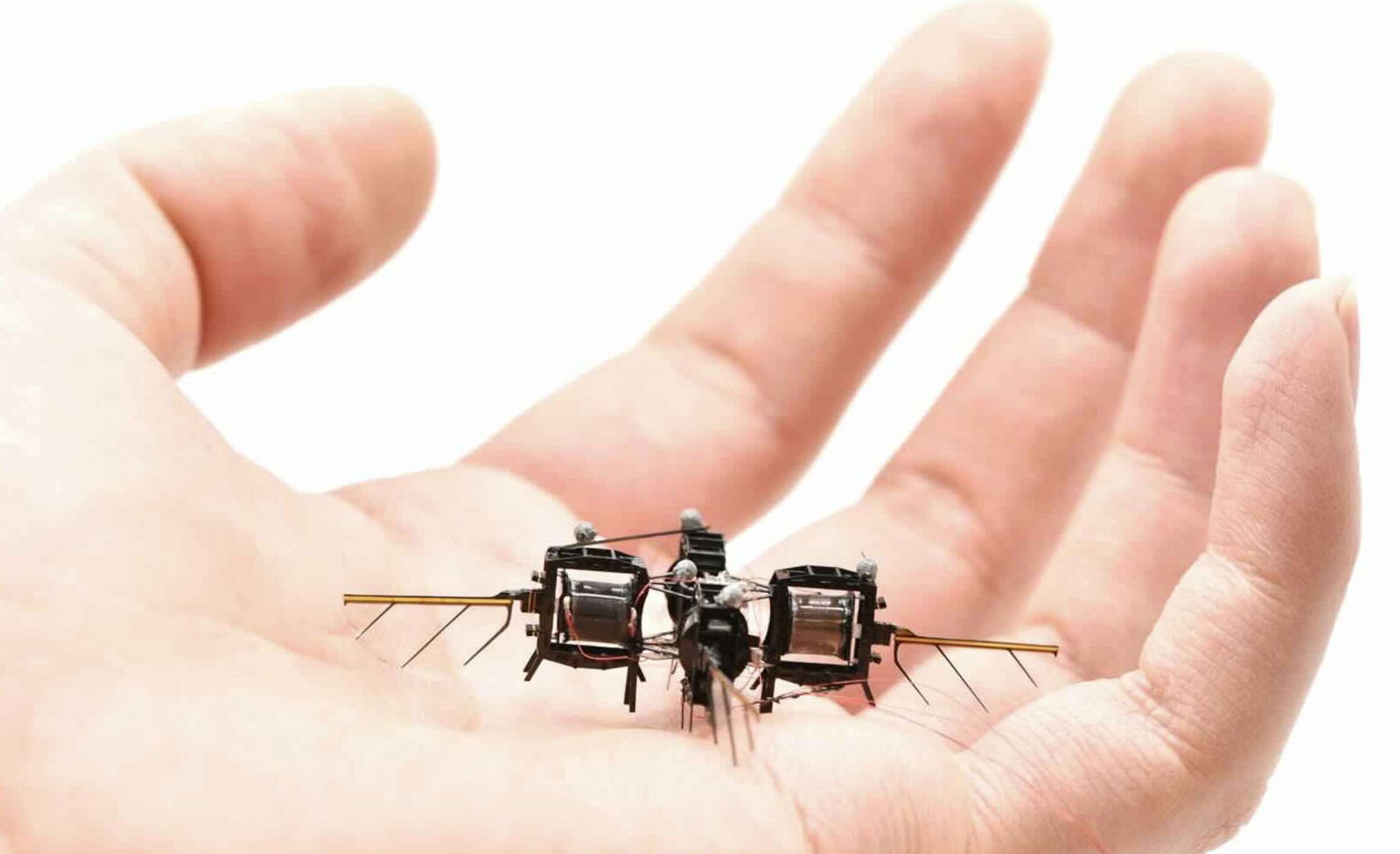
Move over bees, MIT researchers have developed a robot insect designed for artificial pollination, laying the groundwork for entirely indoor farms of the future.
The robot’s lifelike flapping wings imitate nature, enabling the tiny aerial robot to weigh under a gram. The agile and resilient new model represents a significant advancement in small-scale robotics.
The envisioned indoor farm would grow fruits and vegetables inside a multilevel warehouse, maximizing yield per acre while minimizing environmental impacts through a controlled, closed-loop system.
Under these conditions, robot insects would reside in mechanical hives and be deployed in swarms for synchronized pollination missions. However, robotic insects currently in development still fall short of matching natural bees in speed, maneuverability, and endurance.
Robotic Farming of the Future
MIT’s New England robotics team has been refining their designs for some time. Earlier prototypes included a much more fragile creation made up of four identical two-wing units assembled into an eight-wing ring roughly the size of a microcassette.
“But there is no insect that has eight wings. In our old design, the performance of each individual unit was always better than the assembled robot,” said Kevin Chen, an associate professor in MIT’s Department of Electrical Engineering and Computer Science (EECS) and head of the Soft and Micro Robotics Laboratory within the Research Laboratory of Electronics (RLE). Chen is the senior author of an open-access paper on the new design.
Analyzing the robot’s earlier performance, the team found that the design caused the wings to interfere with one another, as their airflow clashed. Additionally, the actuators, functioning as artificial muscles, often buckled under the high-frequency movements required for insect-like flight.
The team turned to nature for inspiration to address these challenges, aiming to bridge the gap between natural and robotic performance. The updated robotic insect can now hover for nearly 17 minutes—an improvement of over 100 times compared to earlier models.
A Landmark Test Flight
“When my student Nemo was performing that flight, he said it was the slowest 1,000 seconds he had spent in his entire life. The experiment was extremely nerve-racking,” Chen explained.
In an impressive demonstration, the team guided the tiny robot insect to spell out “M-I-T” during its flight maneuvers, which included flips and double flips.
“At the end of the day, we’ve shown flight that is 100 times longer than anyone else in the field has been able to do, so this is an extremely exciting result,” Chen remarked.
Pushing the Boundaries of Robotic Insect Technology
The new robotic insect is lightweight yet highly maneuverable, capable of performing advanced movements like double flips while maintaining its durability. At less than the weight of a paper clip, the robot is built to minimize stress on its delicate wings while maximizing precision and agility.
“The amount of flight we demonstrated in this paper is probably longer than the entire amount of flight our field has been able to accumulate with these robotic insects. With the robot’s improved lifespan and precision, we are getting closer to some fascinating applications, like assisted pollination,” Chen said.
Refining the Design
The new design still uses four identical units, but each has just one wing oriented away from the center. Each unit incorporates a hinged wing, a soft muscle actuator, and a transmission system. This configuration improves stability and frees up space to accommodate electronic sensors or batteries. The team also developed a more complex yet durable transmission system featuring an elongated hinge design to reduce stress on the wings.

“Compared to the old robot, we can now generate control torque three times larger than before, which is why we can do very sophisticated and accurate path-finding flights,” Chen explained.
Next Steps in Robot Insect Innovation
Despite these advances, the team acknowledges that their robots are still far from matching the performance of real bees, which rely on a complex system of finely controlled muscles to maneuver their wings.
“A very sophisticated set of muscles finely controls the wings of bees. That level of fine-tuning is something that truly intrigues us, but we have not yet been able to replicate,” Chen commented.
The team’s next goal is to increase the robot’s flight duration by tenfold and enhance its precision to the point where it can land on and take off from flowers for selective pollination. A more long-term goal involves equipping the robot with batteries and sensors for practical, real-world use. Currently, the robot requires an external power source, limiting its operation to the lab.
“This new robot platform is a major result from our group and leads to many exciting directions. For example, incorporating sensors, batteries, and computing capabilities on this robot will be a central focus in the next three to five years,” Chen said.
The paper “Acrobatics at the Insect-Scale: a Durable, Precise, and Agile Micro-Aerial-Robot” appeared on January 15, 2025 in Science Robotics.
Ryan Whalen covers science and technology for The Debrief. He holds an MA in History and a Master of Library and Information Science with a certificate in Data Science. He can be contacted at ryan@thedebrief.org, and follow him on Twitter @mdntwvlf.