A team of North Carolina State University Engineers has devised a shapeshifting robot inspired by the ancient Japanese paper-folding art of Origami, capable of functions ranging from space exploration to disaster relief.
By implementing hierarchical concepts observed in nature, the team’s approach combines simple and efficient kinematics with “rich shape-morphing capability” to successfully mitigate the complexity and power use issues holding back earlier concept work from real-life implementation. The researchers believe these improvements could pave the way to a simpler, more malleable shape-shifting robot for practical use.
“The question we’re asking is how to achieve a number of versatile shapes with the fewest number of actuators powering the shapeshifting,” said Jie Yin, associate professor of mechanical and aerospace engineering, in a press release announcing their work.
“Here we use a hierarchical concept observed in nature – like layered muscle fibers – but with plastic cubes to create a transforming robot.”
Shape-Shifting Robot Built Like Human Muscles
In that same release, team leader Yin explained that they looked at the hierarchical construction of human muscle, of fiber wrapped in connective tissue, with those bundles once again joined by another layer of connective tissue. To this hierarchical concept, they added a combinatorial principle that the robot could split into sub-pieces or even into smaller autonomous units. According to the team’s new paper recently published in the journal Nature Communications, the combination of these two ideas provided the jumping-off point to rethink how a shape-shifting robot could be composed,
In that work, the team also looked at the issues plaguing previous work, including one Origami-inspired robot previously covered by The Debrief that was otherwise promising. Plus, while advances have been made in other biologically inspired robots, they have so far struggled to compare to the real thing.
For example, the variety of shapes that many robots could put themselves into was limited. Also, those with a more diverse array of potential forms quickly became a complicated mess of intricate control systems and actuators. Their transformations were difficult, lengthy, and tapped too much energy.
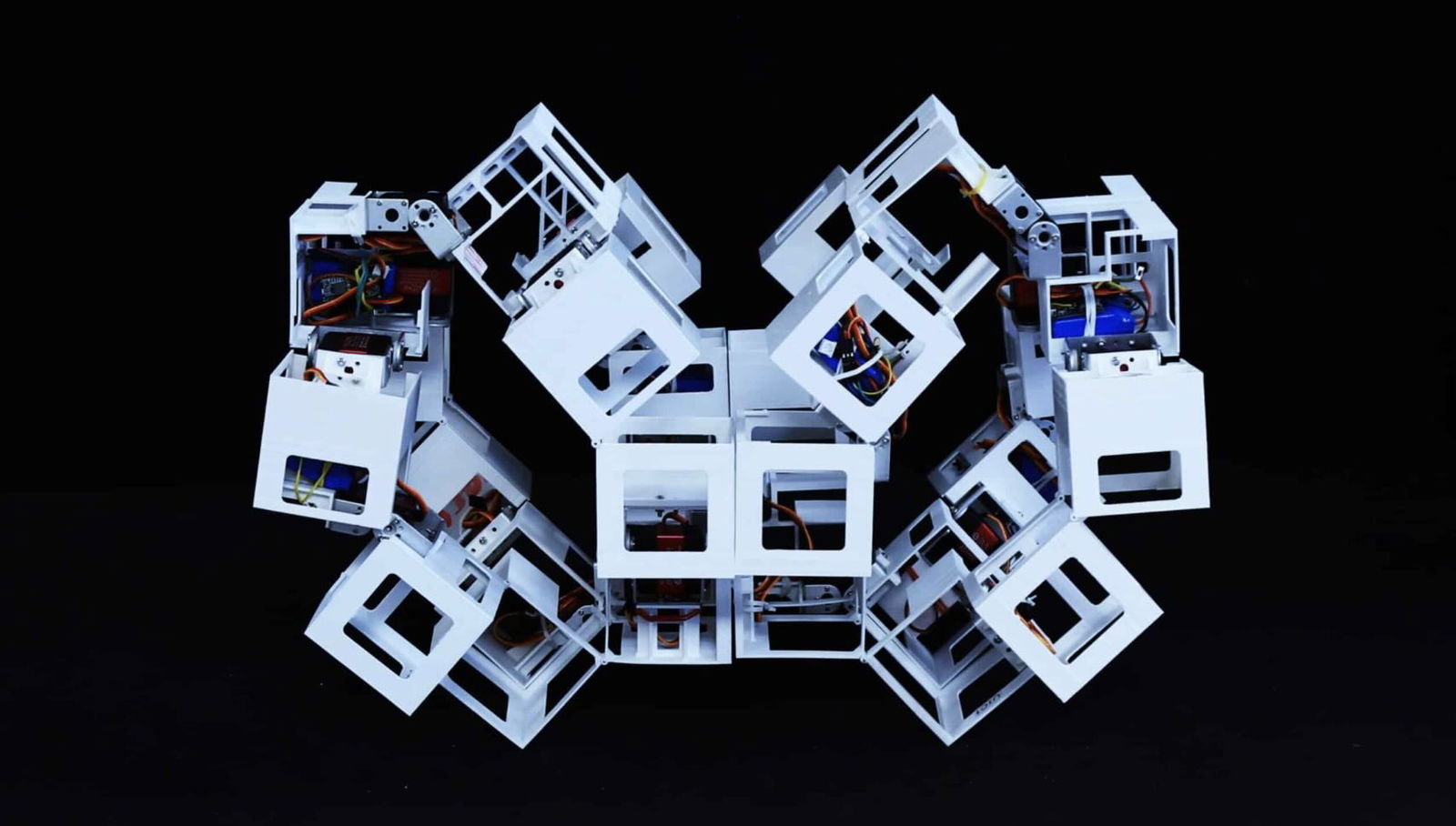
In an effort to overcome those limitations, the team designed a robotics framework that can bend, fold, and reshape itself into a variety of forms. In their shape-shifting robot’s final structure, four, six, or eight cubes are connected by an equal number of hinges acting as joints. These joints are also rotational, increasing the angles available to a single pivot.
Adding to the robot’s versatility, the servomotors that control them are controlled by Bluetooth and powered by rechargeable batteries.
Printing Out a Transforming Robot
To construct their test model, the team relied on 3D printing. First, they printed rigid ABS plastic panels, which were then connected into hollow cubes and joined with flexible hinges. According to the researchers, this design does not just make assembly easy; it becomes a snap to disassemble and change the hierarchy. Additionally, the model tested to have a significant amount of strength. For example, it could support two and a half times its weight even when deployed as a multistory structure. Simpler uses, such as bridges and tunnels, could bear even greater stress, over three and a half times its weight.
“We want to make a more robust structure that can bear larger loads,” said Yanbin Li, an NC State postdoctoral researcher and co-corresponding author of the paper. “If we want a car shape, for example, how do we design the first structure that can transform into a car shape? We also want to test our structures with real-world applications like space robots.”
The efficiency of this robust design relies on allowing for many possibilities while finding the simplest solution. While one robot is equipped with 22 motors controlling 36 joints, it only needs to use up to three at a time for a transformation. This includes rearranging itself from a dense cube into a fully open structure, a feat that was accomplished with only two motors actively driving 16 of its joints.
This reduced transformation times to two minutes from the hours described in earlier work.
When highlighting the design’s efficiency, the paper’s authors noted that at its maximum expansion, the robot could occupy 200 times the initial volume of its components when packed flat. Based on its unprecedented speed of transformation and compactness for transport, the team identified the robots as perfect for use as emergency shelters or other structures needed in rapid deployment situations.

When operating on a planet’s surface, large-scale functions like transforming into a shelter or acting as a cargo robot are possible. In one proposed application, the separate pieces split into multiple robots with separate functions, an idea common in Japanese science fiction entertainment. This level of malleability also allows the shape-shifting robot to assume a more aerodynamic shape for either pointing down and landing or pointing up and taking off without turning the entire structure around. Such a robot could significantly cut down the needed equipment, while simultaneously increasing its own safety and efficiency.
The Future of Space Exploration May Be In Transporting Less
In their paper, the researchers also illustrate an example of how such robots could be used in space exploration. This is consistent with recent work in the field that has been trying to identify ways to make devices more reclaimable and cost-effective. In a previous story, The Debrief looked at the ways engineers have been attempting to make space vehicles reusable.
One example highlighted by the NC State researchers is how it can form itself into a large, flat slab for solar panels, maximizing the surface area for energy collection. It can also reconfigure itself to create holes in its surface for objects to pass harmlessly through, avoiding collisions with small space objects. Such a feature would also allow it to generate docking ports for other spacecraft or even convert itself into a living space for future astronauts.
“We think these can be used as deployable, configurable space robots and habitats,” said Antonio Di Lallo, an NC State postdoctoral researcher and co-first author of the paper. “It’s modular, so you can send it to space flat and assemble it as a shelter or as a habitat, and then disassemble it.”
Whatever form the shape-shifting robots ultimately take, the researchers agree that ease of use will be critical to their overall value.
“For users, it needs to be easy to assemble and to control,” Yin said.
Ryan Whalen covers science and technology for The Debrief. He can be reached at ryan@thedebrief.org.