
In a leap forward for autonomous aerial technology, a new multi-UAV system called SOAR, equipped with LiDAR and visual sensors, promises faster and more accurate 3D reconstructions of complex environments.
This innovation could have far-reaching implications, from military reconnaissance to urban planning, structural inspection, and cultural heritage preservation. It offers a potential game-changer for how we explore, map, and monitor areas from the sky.
“Our approach exhibits superior efficiency and reconstruction quality compared to state-of-the-art methods, as demonstrated through rigorous evaluations in complex simulation environments,” researchers wrote.
Unmanned Aerial Vehicles (UAVs) have long been recognized as powerful tools for military, environmental, and commercial applications.
In a preprint paper published on arXiv, researchers from Sun Yat-Sen University and the Hong Kong University of Science and Technology announced the development of “Simultaneous Exploration and Photographing with Heterogeneous UAVs for Fast Autonomous Reconstruction” or “SOAR.”
The platform integrates a new multi-UAV system that combines LiDAR and visual sensors to enable faster, autonomous 3D reconstruction of complex environments.
With potential applications in urban planning, digital cultural heritage preservation, and structural inspections, SOAR could also have substantial military applications, particularly in scenarios where swift and accurate reconnaissance is critical.
The SOAR system is built around a swarm of tandem UAVs. At the heart of the system is a LiDAR-equipped UAV, known as the “explorer,” which handles surface mapping and creates a real-time model of the environment.
As the explorer gathers data, it continuously generates viewpoints for secondary UAVs, or “photographers,” equipped with high-resolution cameras. These photographers then navigate to optimal locations to capture images, ensuring that every nook and cranny of the target area is covered.
The process relies on an advanced algorithm, “the Consistent Multiple Depot Multiple Traveling Salesman Problem” (Consistent-MDMTSP), designed to optimize the UAVs’ flight paths. This ensures maximum efficiency in covering large areas while minimizing overlap and reducing the time required for each mission.
The team behind SOAR believes that the system’s ability to autonomously explore and reconstruct large, complex areas makes it ideal for applications where time is of the essence. Although the researchers do not specifically address military applications, SOAR could hold significant potential for use in the defense sector.
For example, military forces conducting reconnaissance missions in unfamiliar or hostile environments could deploy SOAR to quickly map out terrain and uncover potential hazards or enemy positions.
Traditionally, aerial reconnaissance has relied on manned aircraft or satellites, which can be limited by availability, weather conditions, or geopolitical restrictions. UAVs offer greater flexibility, but current systems still face limitations in terms of coverage area, speed, and data accuracy.
With SOAR, a military force could deploy a fleet of UAVs to autonomously scan vast landscapes, including difficult terrains like dense forests or urban environments. The LiDAR sensor, which provides a large field of view and operates independently of lighting conditions, could detect obstacles and structures that might be missed by standard visual systems. Once the scene has been mapped, the UAVs can quickly switch to image-capturing mode, photographing key areas for further analysis.
SOAR could offer a distinct advantage in combat or intelligence-gathering missions. Its rapid data collection and 3D reconstruction capabilities mean that ground forces could receive up-to-date, highly detailed maps in real-time. This would allow commanders to make informed decisions faster, potentially saving lives in high-risk situations.
Furthermore, SOAR’s autonomous nature minimizes the need for human intervention, reducing the risk to personnel and making it suitable for operations in contested or hostile environments.
Although the military applications are straightforward, SOAR’s potential extends far beyond the battlefield. In urban planning, for instance, the system could create highly detailed 3D models of cities, enabling planners to make more informed decisions about infrastructure development. The system could also be used to inspect bridges, buildings, and other critical infrastructure in ways that are both safer and more efficient than current methods.
SOAR could play a vital role in digital cultural heritage preservation. Many historical sites, particularly in remote or unstable regions, are at risk from natural disasters or human conflict. Using SOAR, researchers could quickly create accurate 3D models of these sites, preserving them digitally even if the physical structures are damaged or destroyed.
In disaster response scenarios, where time is critical, SOAR could provide first responders with detailed maps of affected areas. This could significantly speed up search and rescue operations and aid in the delivery of supplies to hard-to-reach locations.
While there are other UAV-based systems for 3D reconstruction, SOAR’s integration of both LiDAR and visual sensors gives it a significant edge. LiDAR, which uses lasers to measure distances and create highly accurate 3D maps, is particularly useful in environments where visual data alone might be unreliable, such as at night or in thick vegetation. Meanwhile, the system’s ability to assign optimal camera angles and flight paths to the photographer UAVs ensures that every detail is captured.
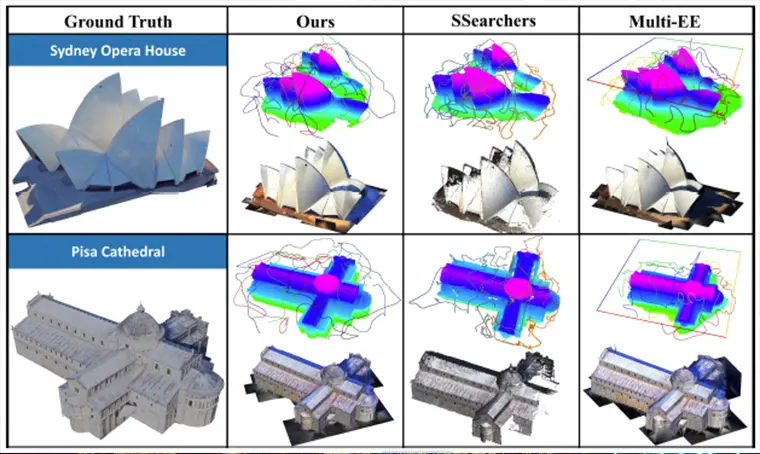
In their paper, researchers shared images showing the simulated trajectories generated and 3D reconstruction by SOAR of the Sydney Opera House in Australia and Pisa Cathedral in Italy. In both examples, the multi-UAV LiDAR system produced remarkably detailed and accurate reconstructions compared to those made by other previous multi-UAV systems, including the “Star Searcher” and “Multi-EE” models.
The researchers also point out that SOAR’s ability to incrementally generate viewpoints and optimize flight paths in real-time makes it far more efficient than existing UAV systems, which often require pre-programmed routes and rely heavily on prior models of the environment. By combining the best of both model-based and model-free approaches, SOAR reduces the time required to scan and reconstruct an area by a substantial margin.

According to the research team, SOAR’s ability to iteratively optimize its task assignments, ensuring consistency and minimizing redundant operations, is one of the key reasons for its superior performance.
Integrating SOAR with other advanced UAV systems, such as XTEND, could enable a single operator to control a drone swarm using a blend of virtual and augmented reality. This combination would allow for highly detailed and precise 3D mapping of complex environments.
While SOAR holds significant potential, there are still challenges to overcome before it can be widely adopted. For instance, the system relies on uninterrupted communication between UAVs, which may be difficult to maintain in certain environments.
Additionally, the current version of SOAR has only been tested in simulations, and real-world applications may present additional hurdles, such as unpredictable weather or interference from other signals.
However, researchers plan to continue refining the system. Future versions are expected to include enhanced communication protocols and improved algorithms for handling larger and more complex environments.
Ultimately, the development of SOAR could mark an important milestone in UAV technology, particularly for applications where fast, accurate 3D mapping is essential.
Whether deployed in military operations, urban planning, or disaster relief, this LiDAR-based UAV system offers a powerful new tool for exploring and documenting the world around us.
As UAV technology advances, we can expect more platforms like SOAR that integrate cutting-edge sensors, intelligent algorithms, and real-time data processing, revolutionizing military and civilian aerial reconnaissance missions.
Tim McMillan is a retired law enforcement executive, investigative reporter and co-founder of The Debrief. His writing typically focuses on defense, national security, the Intelligence Community and topics related to psychology. You can follow Tim on Twitter: @LtTimMcMillan. Tim can be reached by email: tim@thedebrief.org or through encrypted email: LtTimMcMillan@protonmail.com